

Free, Forced And Damped Oscillation
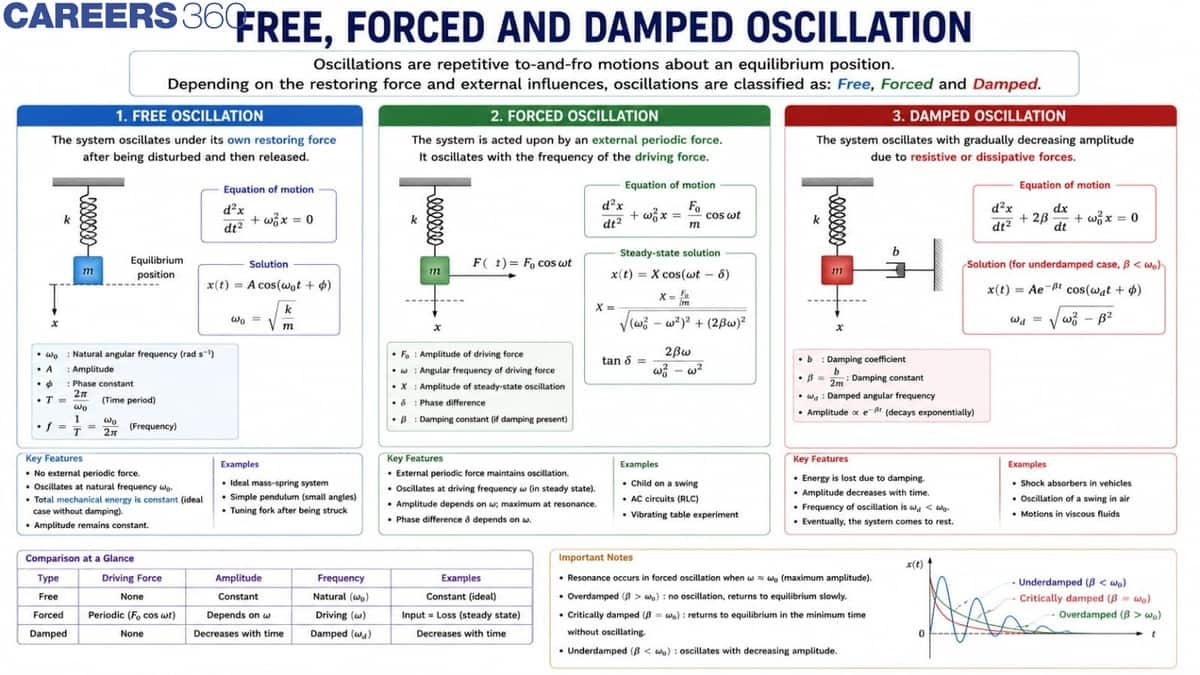
Oscillations are a fundamental part of our daily lives, observable in everything from the gentle sway of a swing to the rhythmic vibrations of a guitar string. These oscillations can occur in various forms, categorized as free, forced, and damped. A free oscillation happens when an object is set into motion and allowed to oscillate without any external force acting on it, like a pendulum in a vacuum. Forced oscillations, on the other hand, occur when a continuous external force drives the motion, such as a child pushing a swing to keep it moving. Damped oscillations involve a resistive force, like friction, which gradually decreases the amplitude of the motion, similar to how a car's suspension system smooths out bumps on the road. Understanding these different types of oscillations helps us grasp how various systems, both natural and engineered, respond to forces and dissipate energy.
This Story also Contains
- What is Free Undamped Oscillation?
- What is Damped Oscillation?
- Solved Examples Based on Damped Harmonic Motion
- Example 1: The equation of a damped SHM is given by $m \frac{d^2 x}{d t^2}+b \frac{d x}{d t}+k x=0$, then the angular frequency will be
- Summary
What is Free Undamped Oscillation?
The oscillation of a particle with fundamental frequency under the influence of restoring force is defined as free oscillation. The amplitude, frequency, and energy of oscillation remain constant. The frequency of free oscillation is called natural frequency because it depends upon the nature and structure of the body.
What is Damped Oscillation?
The oscillation of a body whose amplitude goes on decreasing with time is defined as damped oscillation. The amplitude of these oscillations decreases exponentially (as shown in the below figure) due to damping forces like frictional force, viscous force, etc.

These damping forces are proportional to the magnitude of the velocity and their direction always opposes the motion. Due to the decrease in amplitude, the energy of the oscillator also decreases exponentially
The equation of motion of Damped oscillation is given by
$$
m \frac{d u}{d t}=-k x-b u
$$
where
$u=$ velocity
$-b u=$ damping force
$\mathrm{b}=$ damping constant
$-k x=$ restoring force
Or using $u=\frac{d x}{d t}$
where $\mathrm{x}=$ displacement of damped oscillation
we can write, The equation of motion of Damped oscillation as
$$
m \frac{d^2 x}{d t}=-k x-b \frac{d x}{d t}
$$
The solution of the above differential equation will give us the formula of x as
$$
x=A_0 e^{-\frac{b t}{2 m}} \cdot \sin \left(\omega^{\prime} t+\delta\right)
$$
where $\omega^{\prime}=$ angular frequency of the damped oscillation
and
$$
\omega^{\prime}=\sqrt{\frac{k}{m}-\left(\frac{b}{2 m}\right)^2}=\sqrt{\omega_0^2-\left(\frac{b}{2 m}\right)^2}
$$
The amplitude in damped oscillation decreases continuously with time according to
$$
A=A_0 \cdot e^{-\frac{b t}{2 m}}
$$
The energy in damped oscillation decreases continuously with time according to
$$
E=E_0 \cdot e^{-\frac{b t}{m}} \text { where } E_0=\frac{1}{2} k A_0^2
$$
Critical damping- The condition in which the damping of an oscillator causes it to return as quickly as possible to its equilibrium position without oscillating back and forth about this position.
Critical damping happens at
$$
\omega_0=\frac{b}{2 m}
$$
Recommended Topic Video
Solved Examples Based on Damped Harmonic Motion
Example 1: The equation of a damped SHM is given by $m \frac{d^2 x}{d t^2}+b \frac{d x}{d t}+k x=0$, then the angular frequency will be
1) $\omega=\left[\frac{k}{m}-\frac{b^2}{4 m^2}\right]^{\frac{1}{2}}$
2) $\omega=\left[\frac{k}{m}-\frac{b}{4 m}\right]^{\frac{1}{2}}$
3) $\omega=\left[\frac{k}{m}-\frac{b^2}{4 m}\right]^{\frac{1}{2}}$
4) $\omega=\left[\frac{k}{m}-\frac{b^2}{4 m^2}\right]$
Solution:
Damped Harmonic motion
equation of motion
$$
m \frac{d u}{d t}=-k x-b u
$$
where
$-b u$ is restitute
$-k x$ is restoring force
Or using $u=\frac{d x}{d t}$
where $\mathrm{x}=\mathrm{displacement}$ of damped oscillation
we can write, The equation of motion of Damped oscillation as
$$
m \frac{d^2 x}{d t}=-k x-b \frac{d x}{d t}
$$
The solution of the above differential equation will give us the formula of $x$ as
$$
x=A_0 e^{-\frac{b t}{2 m}} \cdot \sin \left(\omega^{\prime} t+\delta\right)
$$
where $\omega^{\prime}=$ angular frequency of the damped oscillation
and
$$
\omega^{\prime}=\sqrt{\frac{k}{m}-\left(\frac{b}{2 m}\right)^2}=\sqrt{\omega_0^2-\left(\frac{b}{2 m}\right)^2}
$$
Hence, the answer is the option (1).
Example 2: A particle is executing SHM then the graph of acceleration as a function of displacement is
1) A straight line
2) A circle
3) An ellipse
4) A hyperbola
Solution:
Damped Harmonic motion
equation of motion
$$
m \frac{d u}{d t}=-K x-b u
$$
wherein
$-b u$ is restitute
$-K x$ is restoring force
Acceleration $\propto$ Displacement
Hence, the answer is the option (1).
Example 3: A thin strip 10 cm long is on a U-shaped wire of negligible resistance and it is connected to a spring of spring constant $0.5 \mathrm{Nm}^{-1}$ (see figure). The assembly is kept in a uniform magnetic field of 0.1 T. If the strip is pulled from its equilibrium position and released, the number of oscillations it performs before its amplitude decreases by a factor of e is N. If the mass of the strip is 50 grams, its resistance and air drag negligible, N will be close to :

1) 5000
2) 1000
3) 10000
4) 50000
Solution:
$\begin{aligned} & l=10 \mathrm{~cm} \\ & k=0.5 \mathrm{~N} / \mathrm{m} \\ & B=0.1 \mathrm{~T} \\ & -k x-i l B=\frac{m d^2 x}{d t^2} \ldots . . \\ & i=\frac{B l}{R} \frac{d x}{d t} \quad(2) \rightarrow \text { Put in }(1) \\ & -k x-\frac{B^2 l^2}{R} \frac{d x}{d t}=\frac{m d^2 x}{d t^2} \\ & \Rightarrow A=A_o e^{-k t} \\ & A=\frac{A_o}{e}=A_o e^{-k t}\end{aligned}$
$\begin{aligned} & k t=1 \\ & \Rightarrow\left(\frac{B^2 l^2}{R .2 m}\right) t=1 \\ & t=\frac{2 m R}{B^2 l^2}=\frac{2 \times 50 \times 10^{-3} \times 10}{0.1 \times 0.1 \times 10 \times 10^{-4} \times 10} \\ & t=10^4 s \\ & T_o=2 \pi \sqrt{\frac{m}{k}}=2 \pi \sqrt{\frac{50 \times 10^{-3}}{0.5}}=\frac{2 \pi}{\sqrt{10}} \\ & \text { No. of oscillations }=\frac{t}{T_o}=\frac{10^4 \times \sqrt{10}}{2 \pi} \approx 5000\end{aligned}$
Hence, the answer is the option (1).
Example 4: The amplitude in the forced oscillation can never be
1) Infinite
2) Positive
3) Both of these
4) none of these
Solution:
Amplitude in forced oscillation is given as
$$
A=\frac{\frac{F_0}{m}}{\sqrt{\left(\omega^2-\omega_0^2\right)+\left(\frac{b \omega}{m}\right)^2}}
$$
So
In the absence of damping force $\mathrm{b}=0$, the steady-state amplitude approaches infinity
$\omega \rightarrow \omega_o$ then $A \rightarrow \infty$
But In real life, the amplitude can't be infinite both because there is always some damping and because there will always be some difference, however small, between $\omega$ and $\omega_o$
Hence, the answer is the option (1).
Example 5: The angular frequency of the damped oscillator is given by, $\omega=\sqrt{\left(\frac{k}{m}-\frac{r^2}{4 m^2}\right)}$ where k is the spring constant, m is the mass of the oscillator and r is the damping constant. If the ratio $\frac{r^2}{m k}$ is 8%, the change in time period compared to the undamped oscillator is approximately as follows :
1) increases by 1%
2) increases by 8%
3) decreases by 1%
4) decreases by 8%
Solution:
$\begin{aligned} & \omega=\sqrt{\frac{k}{m}-\frac{r^2}{4 m^2}}=\sqrt{\frac{k}{m}\left(1-\frac{r^2}{4 k m}\right)} \\ & \omega=\sqrt{\frac{k}{m}}\left(1-\frac{r^2}{4 k m}\right)^{1 / 2} \\ & \omega=\omega_0\left[1-\frac{r^2}{8 k m}\right] \\ & \omega=\omega_0(1-0.01) \\ & \omega=0.99 \omega_0 \\ & T=1.01 T_0\end{aligned}$
The time period is increased by 1 %
Hence, the answer is the option (1).
Summary
