

Three Dimensional Geometry
Imagine trying to describe the position of an aeroplane flying in the sky or a drone hovering above a building. A flat map showing only length and breadth is not enough, as you also need height to locate the object accurately. This is where Three Dimensional Geometry becomes essential, as it allows us to study the position and relationship of objects in space using three coordinates. In Class 12 Mathematics, Three Dimensional Geometry is the study of points, lines, and planes in three-dimensional space using coordinate geometry. A point in space is represented by an ordered triplet (x,y,z), which denotes its position with respect to the three mutually perpendicular axes. This chapter builds on the basic ideas introduced in Class 11 Introduction to Three Dimensional Geometry and extends them to advanced concepts involving equations of lines and planes, distances, and angles. A common real-life application of three dimensional geometry can be seen in aviation, architecture, navigation, and computer graphics, where the exact position and direction of objects in space are crucial.
This Story also Contains
- Introduction to Three-Dimensional Geometry in Mathematics
- Three-Dimensional Geometry Formulae List
- Three Dimensional Geometry in Mathematics: Solved Previous Year Questions
- List of Topics According to NCERT/JEE Mains
- Three Dimensional Geometry in Different Exams
- Important Books and Resources for Class 12 Three Dimensional Geometry
- NCERT Resources For Three Dimensional Geometry
- NCERT Subjectwise Resources
- Practice Questions based on Three Dimensional Geometry
- Conclusion
In the Three Dimensional Geometry Class 12 chapter, students learn important topics such as direction cosines and direction ratios, equations of lines and planes, angle between two lines or planes, and the shortest distance between skew lines. This chapter plays a vital role in developing spatial visualisation and analytical thinking, which are essential for higher studies in science and engineering. In this article, we cover Three Dimensional Geometry Class 12 concepts, definitions, important formulas, solved examples, and practice questions, helping students gain conceptual clarity and perform confidently in board examinations as well as competitive exams like JEE and NEET.
Introduction to Three-Dimensional Geometry in Mathematics
Three-dimensional geometry is defines the world. Three dimensional geometry is one of the fundamental topics in various domains like astronomy, engineering, architecture, and so on.
3D Coordinate System
The position of a point in two-dimension (2D) is given by two numbers $P(x, y)$, but in three-dimension geometry, the position of a point $P$ is given by three numbers $P(x, y, z)$.

Three mutually perpendicular lines intersect at one point, the point $O(0, 0, 0)$ is known as the origin in the space. These three mutually perpendicular lines form three planes, namely $XY, YZ, ZX$, called coordinate planes. The $x$ and $y$ axis make $X Y$ plane, $y, z$ axis make $Y Z$ plane, similarly, ${x}, z$ axis make $XZ$ plane. This three-plane divides space into eight regions called octants.
The sign of the coordinates of a point determines the octant in which the point lies. The following table shows the signs of the coordinates in eight octants.

| Octant | 1st | 2nd | 3rd | 4th | 5th | 6th | 7th |
8th |
|---|---|---|---|---|---|---|---|---|
| X | + | - | - | + | + | - | - | + |
| Y | + | + | - | - | + | + | - | - |
| Z | + | + | + | + | - | - | - | - |
Direction Cosines
Direction Cosine(DC) gives the relation of a vector or a line in a three-dimensional space, with each of the three axes. The direction cosine is the cosine of the angle subtended by this line with the $x$-axis, $y$-axis, and $z$-axis, respectively. Let $r$ be the position vector of a point $P(x, y, z)$. Then, the direction cosines of vector $r$ are the cosines of angles $α, β,$ and $γ$ (i.e. $\cos α, \cos β,$ and $\cos γ$) that the vector $r$ makes with the positive direction of $X, Y,$ and $Z$ -axes, respectively. Direction cosines are usually denoted by $l, m,$ and $n$ respectively.

$\alpha, \beta, \gamma$ are the angles that a vector makes with positive $X$ -axis, $Y$ -axis, and $Z$ -axis respectively then $\cos \alpha, \cos \beta, \cos \gamma$ are known as direction cosines, generally denoted by $(l,m,n)$.
$
\begin{aligned}
& l=\cos \alpha, m=\cos \beta, n=\cos \gamma \\
& l^2+m^2+n^2=1 \\
& \cos ^2 \alpha+\cos ^2 \beta+\cos ^2 \gamma=1
\end{aligned}
$
Direction Cosines of the Line Passing Through Two Points
Let $\mathrm{P}\left(\mathrm{x}_1, \mathrm{y}_1, \mathrm{z}_1\right)$ and $\mathrm{Q}\left(\mathrm{x}_2, \mathrm{y}_2, \mathrm{z}_2\right)$ be two points on the line L .
Let $1, \mathrm{~m}$, and n be the direction cosines of the line $P Q$, and let it make angles $\alpha, \beta$, and $y$ with the $x$-axis, $y$-axis, and $z$-axis respectively.
The direction cosines of the line segment joining the points $P$ and $Q$ are given by
$
\left(\frac{x_2-x_1}{P Q}, \frac{y_2-y_1}{P Q}, \frac{z_2-z_1}{P Q}\right)
$
Properties of Direction Cosines
i) $\sin ^2 \alpha+\sin ^2 \beta+\sin ^2 \gamma=2$
ii) If $\mathrm{OP}=\mathrm{r}$ then the co-ordinates of P will be ( $\mathrm{lr}, \mathrm{mr}, \mathrm{nr}$ )
iii) Direction cosines of the $X$ -axis are $(1,0,0)$
iv) Direction cosines of the $Y$ -axis are $(0,1,0)$
v) Direction cosines of the $Z$ -axis are $(0,0,1)$
Direction Ratios
Direction Ratios are any set of three numbers that are proportional to the Direction Cosines. Direction cosines and Direction ratios are related to each other.
If $\mathrm{l}, \mathrm{m}, \mathrm{n}$ are DCs of a vector, then $\lambda l, \lambda m, \lambda n$ are DRs of this vector, where $\lambda$ can take any real value.
DRs are also denoted as $\mathrm{a}, \mathrm{b}$, and c respectively.
A vector has only one set of DCs, but infinite sets of DRs.
Note:
The coordinates of a point equal Ir, mr, and nr, which are proportional to the direction cosines. Hence, the coordinates of a point are also its DRs.
If $\vec{r}=a i+b \hat{j}+c \hat{k}$, then $a, b$ and $c$ are one of the direction ratios of the given vector. Also, if $a^2+b^2+c^2=1$, then $a, b$ and $c$ will be direction cosines of the given vector.
Properties of Directions Ratios
(i) If $a, b,$ and $c$ are direction ratios then direction cosines will be
$
l=\frac{ \pm a}{\sqrt{a^2+b^2+c^2}}, m=\frac{ \pm b}{\sqrt{a^2+b^2+c^2}}, n=\frac{ \pm c}{\sqrt{a^2+b^2+c^2}}
$
(ii) Direction ratios of a line joining two given points
$A\left(x_1, y_1, z_1\right)$ and $B\left(x_2, y_2, z_2\right)$ is given by
$
\left(x_2-x_1, y_2-y_1, z_2-z_1\right)
$
(iii) If $r=a \hat{i}+b \hat{j}+c \hat{k}$ is a vector with direction cosines $\mathrm{I}, \mathrm{m}, \mathrm{n}$, then
$
l=\frac{a}{|r|}, m=\frac{b}{|r|}, n=\frac{c}{|r|}
$
Section Formula in Three Dimensional Geometry
If the point $R(x, y, z)$ divides the line joining the points $P\left(x_1, y_1, z_1\right)$ and $Q\left(x_2, y_2, z_2\right)$ internally in the ratio $m: n$, then the coordinate of $R(x, y, z)$ is given by :
$\mathrm{R}(\mathrm{x}, \mathrm{y} . \mathrm{z})=\left(\frac{m x_2+n x_1}{m+n}, \frac{m y_2+n y_1}{m+n}, \frac{m z_2+n z_1}{m+n}\right)$

If the point $R$ divides $P Q$ externally in the ratio $m$ : $n$, then its coordinates are obtained by replacing $n$ with $(-n)$, so that the coordinates of point $R$ will be
$\mathrm{R}(\mathrm{x}, \mathrm{y}, \mathrm{z})=\left(\frac{m x_2-n x_1}{m-n}, \frac{m y_2-n y_1}{m-n}, \frac{m z_2-n z_1}{m-n}\right)$
Equation of a Line in 3D
The equation of the straight line in 3D requires two points that are located in space. The point in three coordinates is expressed as $(x, y, z)$.
Equation of a line through a given point and parallel to a given vector in Vector Form
Let $L$ be $a$ line in space passing through point $P\left(x_0, y_0, z_0\right)$. Let $\overrightarrow{\mathbf{b}}=a \hat{\mathbf{i}}+b \hat{\mathbf{j}}+c \hat{\mathbf{k}}$ be a vector parallel to $L$ . Then, for any point on line $\mathrm{Q}(\mathrm{x}, \mathrm{y}, \mathrm{z})$, we know that vector $P Q$ is parallel to vector $b$ . Thus, there is a scalar, $\lambda$, such that $\overrightarrow{P Q}=\lambda \overrightarrow{\mathbf{b}}$, which gives,

$
\begin{gathered}
\overrightarrow{P Q}=\lambda \tilde{\mathbf{b}} \\
\left(x-x_0\right) \hat{i}+\left(y-y_0\right) \hat{j}+\left(z-z_0\right) \hat{k}=\lambda(a \hat{i}+b \hat{j}+c \hat{k})
\end{gathered}
$
Using vector operations, we can rewrite,
$
\begin{aligned}
(x \hat{i}+y \hat{j}+z \hat{k})-\left(x_0 \hat{i}+y_0 \hat{j}+z_0 \hat{k}\right) & =\lambda(a \hat{i}+b \hat{j}+c \hat{k}) \\
(x \hat{i}+y \hat{j}+z \hat{k}) & =\left(x_0 \hat{i}+y_0 \hat{j}+z_0 \hat{k}\right)+\lambda(a \hat{i}+b \hat{j}+c \hat{k})
\end{aligned}
$
Setting $\overrightarrow{\mathbf{r}}=x \hat{i}+y \hat{j}+z \hat{k}$ and $\overrightarrow{\mathbf{r}}_0=x_0 \hat{i}+y_0 \hat{j}+z_0 \hat{k}$ we now have the vector equation of a line:
$
\overrightarrow{\mathbf{r}}=\overrightarrow{\mathbf{r}}_0+\lambda \overrightarrow{\mathbf{b}}
$
Equation of a line through a given point and parallel to a given vector in Cartesian Form
The Equation of a line through a given point and parallel to a given vector in Cartesian Form is $
\frac{x-x_0}{a}=\frac{y-y_0}{b}=\frac{z-z_0}{c}
$
Equation of a line passing through two given points in Cartesian Form
We can also find parametric equations for the line segment $\overrightarrow{\mathbf{r}}=\overrightarrow{\mathbf{p}}+\lambda(\overrightarrow{\mathbf{q}}-\overrightarrow{\mathbf{p}})$.
As the position vector of point $\mathrm{R}(\mathrm{x}, \mathrm{y}, \mathrm{z})$ is $\overrightarrow{\mathbf{r}}=(x \hat{i}+y \hat{j}+z \hat{k})$.
Angle Between Two Lines
The intersection of two straight lines forms an angle. For two intersecting lines, there are two types of angles between the lines: the acute angle and the obtuse angle. The angle between two lines generally gives the acute angle between the two lines.
Angle Between Two Lines in Vector Form
Let the given lines be,
$
\begin{aligned}
& \overrightarrow{\mathbf{r}}=\overrightarrow{\mathbf{r}}_0+\lambda \overrightarrow{\mathbf{b}} \\
& \overrightarrow{\mathbf{r}}={\overrightarrow{\mathbf{r}^{\prime}}}_0+\lambda \overrightarrow{\mathbf{b}}^{\prime}
\end{aligned}
$
As equation (i) and equation (ii) are straight lines in the directions of $\overrightarrow{\mathbf{b}}$ and $\overrightarrow{\mathbf{b}}^{\prime}$, respectively.
Let $\theta$ be the angle between the vectors $\overrightarrow{\mathbf{b}}$ and $\overrightarrow{\mathbf{b}}^{\prime}$
Using the dot product,
$
\begin{aligned}
\overrightarrow{\mathbf{b}} \cdot \overrightarrow{\mathbf{b}}^{\prime} & =|\overrightarrow{\mathbf{b}}|\left|\overrightarrow{\mathbf{b}}^{\prime}\right| \cos \theta \\
\Rightarrow \quad \cos \theta & =\frac{\overrightarrow{\mathbf{b}} \cdot \overrightarrow{\mathbf{b}^{\prime}}}{|\overrightarrow{\mathbf{b}}|\left|\overrightarrow{\mathbf{b}^{\prime}}\right|}
\end{aligned}
$
Angle Between Two Lines in Cartesian Form
The equation of a straight line in Cartesian form is
$
\begin{aligned}
& \frac{x-x_1}{a_1}=\frac{y-y_1}{b_1}=\frac{z-z_1}{c_1} \\
& \frac{x-x_2}{a_2}=\frac{y-y_2}{b_2}=\frac{z-z_2}{c_2}
\end{aligned}
$
Then,
$
\overrightarrow{\mathbf{b}}=a_1 \hat{i}+b_1 \hat{j}+c_1 \hat{k} \quad \text { and } \quad \overrightarrow{\mathbf{b}}^{\prime}=a_2 \hat{i}+b_2 \hat{j}+c_2 \hat{k}
$
So that,
$
\overrightarrow{\mathbf{b}} \cdot \overrightarrow{\mathbf{b}}^{\prime}=a_1 a_2+b_1 b_2+c_1 c_2
$
$
\begin{aligned}
|\overrightarrow{\mathbf{b}}| & =\sqrt{a_1^2+b_1^2+c_1^2}, \quad \text { and } \quad\left|\overrightarrow{\mathbf{b}}^{\prime}\right|=\sqrt{a_2^2+b_2^2+c_2^2} \\
\cos \theta & =\frac{a_1 a_2+b_1 b_2+c_1 c_2}{\sqrt{a_1^2+b_1^2+c_1^2} \sqrt{a_2^2+b_2^2+c_2^2}}
\end{aligned}
$
Angel between two lines in terms of direction cosines and direction ratios
If two lines having direction ratios $\mathrm{a}_1, \mathrm{~b}_1, \mathrm{c}_1$ and $\mathrm{a}_2, \mathrm{~b}_2, \mathrm{c}_2$ then the angle between them is given by
$
\cos \theta=\frac{a_1 a_2+b_1 b_2+c_1 c_2}{\sqrt{a_1^2+b_1^2+c_1^2} \sqrt{a_2^2+b_2^2+c_2^2}}
$
If two lines have direction ratios as $\mathrm{l}_1, \mathrm{~m}_1, \mathrm{n}_1$ and $\mathrm{l}_2, \mathrm{~m}_2, \mathrm{n}_2$ then the angle between them is given by $\cos \theta=l_1 l_2+m_1 m_2+n_1 n_2$
Shortest Distance Between Two Lines
The shortest distance between two lines in three-dimensional space is the length of the perpendicular segment drawn from a point on one line to the other line.
Shortest Distance between Two Skew Lines
When two lines are neither parallel nor intersecting at a point, they are referred to as Skew Lines.
If $\vec{r}=\vec{a}+\lambda \vec{b}$ and $\vec{r}=\overrightarrow{a_1}+\mu \vec{b}$ are skew lines, then the shortest distance between them is given by
$
\left|\frac{\left(\vec{b} \times \overrightarrow{b_1}\right) \cdot\left(\vec{a}-\overrightarrow{a_1}\right)}{\left|\vec{b} \times \overrightarrow{b_1}\right|}\right|
$
Distance between Intersecting lines
The shortest distance between intersecting lines is $0$.
$\left(\vec{b} \times \overrightarrow{b_1}\right) \cdot\left(\overrightarrow{\mathbf{r}}_0^{\prime}-\overrightarrow{\mathbf{r}}_0\right)=0$
Shortest Distance between Parallel Lines
If the direction vectors of two lines are parallel and the two lines never meet, they are referred to as Parallel Lines.
If $\vec{r}=\overrightarrow{p_1}+\lambda \vec{\nu}$ and $\vec{r}=\overrightarrow{p_2}+\mu \vec{\nu}$ are Parallel Lines, then the shortest distance between them is given by $
\frac{\left|\left(\overrightarrow{p_2}-\overrightarrow{p_1}\right) \times \vec{\nu}\right|}{|\vec{\nu}|}
$
What is a Plane?
We know that a line is determined by two points. In other words, for any two distinct points, there is exactly one line that passes through those points, whether in two dimensions or three. Similarly, given any three points that do not all lie on the same line, there is a unique plane that passes through these points. Just as a line is determined by two points, a plane is determined by three.
This may be the simplest way to characterise a plane, but we can use other descriptions as well. For example, given two distinct, intersecting lines, there is exactly one plane containing both lines. A plane is also determined by a line and any point that does not lie on the line.
Equation of a Plane
The equation of a plane in a Cartesian coordinate system can be computed through different methods based on the available input values about the plane.
Equation of a plane in normal form in vector form
The vector equation of a plane normal to unit vector $\hat{\mathbf{n}}$ and at a distance d from the origin is $\overrightarrow{\mathbf{r}} \cdot \hat{\mathbf{n}}=d$.
Equation of a plane in normal form in Cartesian form
If $\mathrm{P}(\mathrm{x}, \mathrm{y}, \mathrm{z})$ is any point in the plane and $\hat{\mathbf{n}}$ is the unit vector normal to the plane.
Let $\mathrm{l}, \mathrm{m}, \mathrm{n}$ be the direction cosines. Then Cartesian equation of the plane in the normal form is given by
$\begin{array}{r}(x \hat{i}+y \hat{j}+z \hat{k}) \cdot({l} \hat{i}+m \hat{j}+n \hat{k})=d \\ \mathbf{l x}+\mathbf{m y}+\mathbf{n z}=\mathbf{d}\end{array}$
Equation of a plane perpendicular to a given vector and passing through a given point in Vector Form
Let $\overrightarrow{\mathbf{n}}=a \hat{\mathbf{i}}+b \hat{\mathbf{j}}+c \hat{\mathbf{k}}$ be a vector and $\mathrm{P}\left(\mathrm{x}_0, \mathrm{y}_0, \mathrm{z}_0\right)$ be a point. Then the set of all points $Q(\mathrm{x}, \mathrm{y}, \mathrm{z})$ such that $\overrightarrow{P Q}$ orthogonal to $\overrightarrow{\mathbf{n}}$ forms a plane.
We say that $\overrightarrow{\mathbf{n}}$ is a normal vector, or perpendicular to the plane.
Remember, the dot product of orthogonal vectors is zero. This fact generates the vector equation of a plane:
$\overrightarrow{\mathbf{n}} \cdot \overrightarrow{P Q}=0$
If the position vector of point $P$ is $\overrightarrow{\mathbf{P}}$ and the plosition vector of point $Q$ is $\overrightarrow{\mathbf{q}}$ , then
$(\overrightarrow{\mathbf{q}}-\overrightarrow{\mathbf{p}}) \cdot \overrightarrow{\mathbf{n}}=\mathbf{0} \quad($ As $\overrightarrow{P Q}=\overrightarrow{\mathbf{q}}-\overrightarrow{\mathbf{p}})$
This is the vector equation of the plane.

Equation of a plane perpendicular to a given vector and passing through a given point in Cartesian form
Position vector of point P and point Q is $\overrightarrow{\mathbf{p}}=x_0 \hat{i}+y_0 \hat{j}+z_0 \hat{k}$ and $\overrightarrow{\mathbf{q}}=x \hat{i}+y \hat{j}+z \hat{k}$ respectively and vector $\overrightarrow{\mathbf{n}}$ is $a \hat{i}+b \hat{j}+c \hat{k}$ Then,
$
\begin{array}{lc}
& (\overrightarrow{\mathbf{q}}-\overrightarrow{\mathbf{p}}) \cdot \overrightarrow{\mathbf{n}}=\mathbf{0} \\
\Rightarrow & \left((x \hat{i}+y \hat{j}+z \hat{k})-\left(x_0 \hat{i}+y_0 \hat{j}+z_0 \hat{k}\right)\right) \cdot(a \hat{i}+b \hat{j}+c \hat{k})=0 \\
\Rightarrow & {\left[\left(x-x_0\right) \hat{i}+\left(y-y_0\right) \hat{j}+\left(z-z_0\right) \hat{k}\right] \cdot(\mathrm{a} \hat{i}+\mathrm{b} \hat{j}+c \hat{k})=0} \\
\text { i.e. } & \mathbf{a}\left(x-x_0\right)+\mathbf{b}\left(y-y_0\right)+\mathbf{c}\left(z-z_0\right)=\mathbf{0}
\end{array}
$
Thus, the coefficients of $x, y,$ and $z$ in the Cartesian equation of a plane are the direction ratios of the normal to the plane.
Equation of a plane passing through three non-collinear points in Vector Form
Let $\mathrm{A}, \mathrm{B}$, and C be three non-collinear points on the plane with position vectors $\overrightarrow{\mathbf{a}}, \overrightarrow{\mathbf{b}}$ and $\overrightarrow{\mathbf{c}}$, respectively.
The vectors, $\overrightarrow{A B}=\overrightarrow{\mathbf{b}}-\overrightarrow{\mathbf{a}}$ and $\overrightarrow{A C}=\overrightarrow{\mathbf{c}}-\overrightarrow{\mathbf{a}}$ are in the given plane. Therefore, the vector $\overrightarrow{A B} \times \overrightarrow{A C}$ is perpendicular to the plane containing points $A, B$, and $C$.

Let $P$ be any point in the plane with a position vector $\overrightarrow{\mathbf{r}}$
Therefore, the equation of the plane passing through $OP$ and perpendicular to the vector $\overrightarrow{A B} \times \overrightarrow{A C}$ is
$
\begin{aligned}
(\vec{r}-\vec{a}) \cdot(\overrightarrow{\mathrm{AB}} \times \overrightarrow{\mathrm{AC}}) & =0 \\
\text { or } \quad(\tilde{\mathbf{r}}-\tilde{\mathbf{a}}) \cdot[(\tilde{\mathbf{b}}-\tilde{\mathbf{a}}) \times(\tilde{\mathbf{c}}-\tilde{\mathbf{a}})] & =0
\end{aligned} \quad(\because \overrightarrow{A R}=(\vec{r}-\vec{a}))
$
This is the equation of the plane in vector form passing through three non-collinear points.
Equation of a plane passing through three non-collinear points in Cartesian Form
Let $\left(x_1, y_1, z_1\right),\left(x_2, y_2, z_2\right)$ and $\left(x_3, y_3, z_3\right)$ be the coordinates of points $A$ , $B$ and $C$ respectively.
Let $P(x, y, z)$ be any point on the plane.
Then, the vectors $\overrightarrow{P A}, \overrightarrow{B A}$ and $\overrightarrow{C A}$ are coplanar.
which is the required equation of the plane.
$
\begin{aligned}
& {\left[\begin{array}{lll}
\overrightarrow{\mathrm{PA}} & \overrightarrow{\mathrm{BA}} & \overrightarrow{\mathrm{CA}}
\end{array}\right]=0} \\
& \left|\begin{array}{ccc}
\mathrm{x}-\mathrm{x}_1 & \mathrm{y}-\mathrm{y}_1 & \mathrm{z}-\mathrm{z}_1 \\
\mathrm{x}_2-\mathrm{x}_1 & \mathrm{y}_2-\mathrm{y}_1 & \mathrm{z}_2-\mathrm{z}_1 \\
\mathrm{x}_3-\mathrm{x}_1 & \mathrm{y}_3-\mathrm{y}_1 & \mathrm{z}_3-\mathrm{z}_1
\end{array}\right|=0
\end{aligned}
$
which is the required equation of the plane.
Intercept form of the equation of a plane in Cartesian Form
The equation of a plane having intercepting lengths $a, b$, and $c$ with $X$-axis, $Y$-axis, and $Z$-axis, respectively is
$
\frac{\mathrm{x}}{\mathrm{a}}+\frac{\mathrm{y}}{\mathrm{b}}+\frac{\mathrm{z}}{\mathrm{c}}=1
$

Equation of a Plane Passing Through a Given Point and Parallel to Two Given Vectors in Vector Form
Let a plane pass through point A with a position vector $\overrightarrow{\mathbf{a}}$ and parallel to two vectors $\overrightarrow{\mathbf{b}}$ and $\overrightarrow{\mathbf{c}}$.

Let $\overrightarrow{\mathbf{r}}$ be the position vector of any point $P$ on the plane.
$
\overrightarrow{A P}=\overrightarrow{O P}-\overrightarrow{O A}=\vec{r}-\vec{a}
$
Since $AP$ lies in the plane, hence, $\overrightarrow{\mathbf{r}}-\overrightarrow{\mathbf{a}}, \overrightarrow{\mathbf{b}}$ and $\overrightarrow{\mathbf{c}}$ are coplanar.
We have,
$
\begin{aligned}
(\overrightarrow{\mathbf{r}}-\overrightarrow{\mathbf{a}}) \cdot(\vec{b} \times \overrightarrow{\mathbf{c}}) & =0 \\
(\overrightarrow{\mathbf{r}}) \cdot(\vec{b} \times \overrightarrow{\mathbf{c}}) & =(\overrightarrow{\mathbf{a}}) \cdot(\overrightarrow{\mathbf{b}} \times \overrightarrow{\mathbf{c}}) \\
{\left[\begin{array}{lll}
\overrightarrow{\mathbf{r}} & \vec{b} & \overrightarrow{\mathbf{c}}
\end{array}\right] } & =\left[\begin{array}{lll}
\overrightarrow{\mathbf{a}} & \vec{b} & \overrightarrow{\mathbf{c}}
\end{array}\right]
\end{aligned}
$
Which is the required equation of plane.
Equation of a Plane Passing Through a Given Point and Parallel to Two Given Vectors in Cartesian Form
$
\begin{aligned}
& \text { From }(\overrightarrow{\mathbf{r}}-\overrightarrow{\mathbf{a}}) \cdot(\overrightarrow{\mathbf{b}} \times \overrightarrow{\mathbf{c}})=0 \text { we have, }[\overrightarrow{\mathbf{r}}-\overrightarrow{\mathbf{a}} \overrightarrow{\mathbf{b } } \overrightarrow{\mathbf{c}}] \\
& \Rightarrow \quad\left|\begin{array}{ccc}
x-x_1 & y-y_1 & z-z_1 \\
x_2 & y_2 & z_2 \\
x_3 & y_3 & z_3
\end{array}\right|=0
\end{aligned}
$
Which is the required equation of a plane in the Cartesian form, where
$
\overrightarrow{\mathbf{b}}=x_2 \hat{\mathbf{i}}+y_2 \hat{\mathbf{j}}+z_2 \hat{\mathbf{k}} \text { and } \overrightarrow{\mathbf{c}}=x_3 \hat{\mathbf{i}}+y_3 \hat{\mathbf{j}}+z_3 \hat{\mathbf{k}}
$
Angle Between Two Planes
The angle between two planes is defined as the angle between the normals of the two planes. It is also called the dihedral angle.
Equation of the Angle Between Two Planes in Vector Form
Let $\theta$ be the angle between two planes $\overrightarrow{\mathbf{r}} \cdot \overrightarrow{\mathbf{n}}_1=\mathbf{d}_1$ and $\overrightarrow{\mathbf{r}} \cdot \overrightarrow{\mathbf{n}}_2=\mathbf{d}_2$ then,
$
\cos \theta=\frac{\overrightarrow{\mathbf{n}}_1 \cdot \overrightarrow{\mathbf{n}}_2}{\left|\overrightarrow{\mathbf{n}}_1\right|\left|\overrightarrow{\mathbf{n}}_1\right|}
$
Equation of the Angle Between Two Planes in Cartesian Form
Let $\theta$ be the angle between the planes, $a_1 x+b_1 y+c_1 z+d_1=0$ and $a_2 x+$ $b_2 y+c_2 z+d_2=0$
Then,
$
\cos \theta=\left|\frac{a_1 a_2+b_1 b_2+c_1 c_2}{\sqrt{a_1^2+b_1^2+c_1^2} \sqrt{a_2^2+b_2^2+c_2^2}}\right|
$
The direction ratios of the normal to the planes are $a_1, b_1, c_1$, and $a_2, b_2$, $\mathrm{c}_2$ respectively.
Three-Dimensional Geometry Formulae List
| Concept | Formula |
|---|---|
| Distance between two points $P(x_1, y_1, z_1)$ and $Q(x_2, y_2, z_2)$ | $d = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2 + (z_2 - z_1)^2}$ |
| Section formula (internal division, ratio $m:n$) | $P\left(\dfrac{mx_2 + nx_1}{m+n}, \dfrac{my_2 + ny_1}{m+n}, \dfrac{mz_2 + nz_1}{m+n}\right)$ |
| Section formula (external division, ratio $m:n$) | $P\left(\dfrac{mx_2 - nx_1}{m-n}, \dfrac{my_2 - ny_1}{m-n}, \dfrac{mz_2 - nz_1}{m-n}\right)$ |
| Midpoint formula | $M\left(\dfrac{x_1 + x_2}{2}, \dfrac{y_1 + y_2}{2}, \dfrac{z_1 + z_2}{2}\right)$ |
| Direction cosines $(l, m, n)$ of vector $(a, b, c)$ | $l = \dfrac{a}{\sqrt{a^2+b^2+c^2}}, ; m = \dfrac{b}{\sqrt{a^2+b^2+c^2}}, ; n = \dfrac{c}{\sqrt{a^2+b^2+c^2}}$ |
| Relation between direction cosines | $l^2 + m^2 + n^2 = 1$ |
| Angle between two lines with direction cosines $(l_1,m_1,n_1)$ and $(l_2,m_2,n_2)$ | $\cos \theta = l_1l_2 + m_1m_2 + n_1n_2$ |
| Equation of a line (vector form) | $\vec{r} = \vec{a} + \lambda \vec{b}$ |
| Equation of a line (cartesian/parametric form) | $\dfrac{x - x_1}{a} = \dfrac{y - y_1}{b} = \dfrac{z - z_1}{c}$ |
| Equation of a plane (vector form) | $\vec{r} \cdot \vec{n} = d$ |
| Equation of a plane (Cartesian form) | $ax + by + cz + d = 0$ |
| Normal form of a plane | $x\cos\alpha + y\cos\beta + z\cos\gamma = p$ |
| Distance of a point $P(x_1, y_1, z_1)$ from a plane $ax+by+cz+d=0$ |
$D = \dfrac{|ax_1 + by_1 + cz_1 + d|}{\sqrt{a^2 + b^2 + c^2}}$ |
| Angle between two planes $a_1x+b_1y+c_1z+d_1=0$ and $a_2x+b_2y+c_2z+d_2=0$ | $\cos \theta = \dfrac{a_1a_2 + b_1b_2 + c_1c_2}{\sqrt{a_1^2+b_1^2+c_1^2},\sqrt{a_2^2+b_2^2+c_2^2}}$ |
| Angle between a line (direction ratios $l,m,n$) and a plane $ax+by+cz+d=0$ |
$\sin \theta = \dfrac{|al + bm + cn|}{\sqrt{a^2+b^2+c^2} \, \sqrt{l^2+m^2+n^2}}$ |
| Equation of a sphere (center $(x_1,y_1,z_1)$, radius $r$) | $(x-x_1)^2 + (y-y_1)^2 + (z-z_1)^2 = r^2$ |
| General equation of a sphere | $x^2 + y^2 + z^2 + 2ux + 2vy + 2wz + d = 0$ |
| Equation of a cone (vertex at origin, axis $z$-axis, semi-vertical angle $\alpha$) | $x^2 + y^2 = z^2 \tan^2 \alpha$ |
| Equation of a cylinder (axis $z$-axis, radius $a$) | $x^2 + y^2 = a^2$ |
| Shortest distance between two skew lines $\vec{r} = \vec{a_1} + \lambda \vec{b_1}$, $\vec{r} = \vec{a_2} + \mu \vec{b_2}$ |
$d = \dfrac{|(\vec{a_2} - \vec{a_1}) \cdot (\vec{b_1} \times \vec{b_2})|}{|\vec{b_1} \times \vec{b_2}|}$ |
Three Dimensional Geometry in Mathematics: Solved Previous Year Questions
Question 1:
Consider the lines $L_1: x-1=y-2=z$ and $L_2: x-2=y=z-1$. Let the feet of the perpendiculars from the point $\mathrm{P}(5,1,-3)$ on the lines $\mathrm{L}_1$ and $\mathrm{L}_2$ be Q and R, respectively. If the area of the triangle PQR is A, then $4 \mathrm{~A}^2$ is equal to :
Solution:
$\begin{aligned}
& P(5,1,-3) \\
& L_1: x-1=y-2=z=\lambda \\
& L_2: x-2=y=z-1=\mu
\end{aligned}$
Any point of $L_1$ is $Q(\lambda+1, \lambda+2, \lambda)$
Any point of $L_2$ is $R(\mu+2, \mu, \mu+1)$
Now $P Q<\lambda-4, \lambda+1, \lambda+3\rangle .\langle 1,1,1\rangle=0$
$\begin{aligned}
& \lambda-4+\lambda+1+\lambda+3=0 \\
& 3 \lambda=0 \\
& \Rightarrow \lambda=0 \\
& \therefore Q(1,2,0)
\end{aligned}$
Also, $P R<\mu-3, \mu-1, \mu+4>.<1,1,1>=0$
$\begin{aligned}
& \mu-3+\mu-1+\mu+4=0 \\
& \Rightarrow \mu=0 \\
& R(2,0,1)
\end{aligned}$
$\begin{aligned} & \text { Area }=\frac{1}{2}|\overrightarrow{P Q} \times \overrightarrow{P R}|=\frac{1}{2}\left| \begin{array}{ccc}\hat{i} & \hat{j} & \hat{k} \\ 4 & -1 & -3 \\ 3 & 1 & -4\end{array}\right| \\ & =\frac{1}{2}|7 \hat{i}+7 \hat{j}+7 \hat{k}|=\frac{1}{2} \times 7 \times \sqrt{3}=\frac{7 \sqrt{3}}{2} \\ & \because A=\frac{7 \sqrt{3}}{2}\end{aligned}$
$\begin{aligned} \Rightarrow 4 A^2 & =(7 \sqrt{3})^2 \\ & =49 \times 3 \\ & =147\end{aligned}$
Hence, the correct answer is 147.
Question 2:
If the equation of the line passing through the point $\left(0,-\frac{1}{2}, 0\right)$ and perpendicular to the lines $\overrightarrow{\mathrm{r}}=\lambda(\hat{\mathrm{i}}+a \hat{\mathrm{j}}+b \hat{\mathrm{k}})$ and
$\overrightarrow{\mathrm{r}}=(\hat{\mathrm{i}}-\hat{\mathrm{j}}-6 \hat{\mathrm{k}})+\mu(-b \hat{\mathrm{i}}+a \hat{\mathrm{j}}+5 \hat{\mathrm{k}})$ is $\frac{x-1}{-2}=\frac{y+4}{d}=\frac{z-c}{-4}$, then $a+b+c+d$ is equal to :
Solution:
Direction ratios of the given line are $-2, d$, and -4
$\Rightarrow-2+a d-4 b=0$
and $2 b+a d-20=0$
subtracting equations (i) and (ii)
$\begin{aligned}
& 6 b-18=0 \\
& b=3
\end{aligned}$
also, line passes through the point $\left(0, \frac{-1}{2}, 0\right)$
$\begin{aligned}
& \Rightarrow \frac{0-1}{-2}=\frac{-\frac{1}{2}+4}{d}=\frac{0-c}{-4} \\
& \Rightarrow d=7, c=2
\end{aligned}$
From equation (i)
$\begin{aligned}
& -2+7 a-12=0 \\
& \Rightarrow a=2 \\
& a+b+c+d=14
\end{aligned}$
Hence, the correct answer is 14.
Question 3:
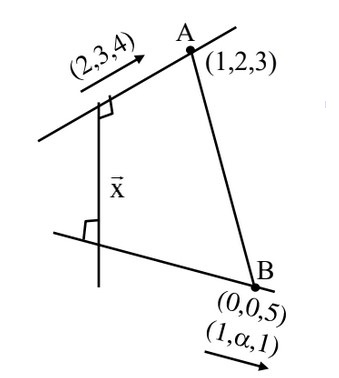
If the shortest distance between the lines $\frac{x-1}{2}=\frac{y-2}{3}=\frac{z-3}{4}$ and $\frac{x}{1}=\frac{y}{\alpha}=\frac{z-5}{1}$ is $\frac{5}{\sqrt{6}}$, then the sum of all possible values of $\alpha$ is:
Solution:
Given:
The lines are:
$
\text{Line 1:} \quad \frac{x - 1}{2} = \frac{y - 2}{3} = \frac{z - 3}{4}
$
$
\text{Line 2:} \quad \frac{x}{1} = \frac{y}{\alpha} = \frac{z - 5}{1}
$
We are given that the shortest distance between the lines is:
$
d = \frac{5}{\sqrt{6}}
$
Vector Form:
Line 1 passes through point $ \vec{a} = \langle 1, 2, 3 \rangle $ with direction $ \vec{p} = \langle 2, 3, 4 \rangle $
Line 2 passes through point $ \vec{b} = \langle 0, 0, 5 \rangle $ with direction $ \vec{q} = \langle 1, \alpha, 1 \rangle $
The shortest distance is given by:
$
d = \frac{|(\vec{a} - \vec{b}) \cdot (\vec{p} \times \vec{q})|}{|\vec{p} \times \vec{q}|}
$
Compute $ \vec{a} - \vec{b} $:
$
\vec{a} - \vec{b} = \langle 1, 2, 3 \rangle - \langle 0, 0, 5 \rangle = \langle 1, 2, -2 \rangle
$
Compute $ \vec{p} \times \vec{q} $:
$
\vec{p} \times \vec{q} =
\begin{vmatrix}
\hat{i} & \hat{j} & \hat{k} \\
2 & 3 & 4 \\
1 & \alpha & 1
\end{vmatrix}
= \hat{i}(3 \cdot 1 - 4 \cdot \alpha) - \hat{j}(2 \cdot 1 - 4 \cdot 1) + \hat{k}(2 \cdot \alpha - 3 \cdot 1)
$
$
= \langle 3 - 4\alpha, 2, 2\alpha - 3 \rangle
$
Now compute the numerator:
$
|(\vec{a} - \vec{b}) \cdot (\vec{p} \times \vec{q})| = |\langle 1, 2, -2 \rangle \cdot \langle 3 - 4\alpha, 2, 2\alpha - 3 \rangle|
$
$
= |(1)(3 - 4\alpha) + (2)(2) + (-2)(2\alpha - 3)| = |3 - 4\alpha + 4 - 4\alpha + 6| = |13 - 8\alpha|
$
Now compute the denominator:
$
|\vec{p} \times \vec{q}| = \sqrt{(3 - 4\alpha)^2 + 2^2 + (2\alpha - 3)^2}
$
$
= \sqrt{(16\alpha^2 - 24\alpha + 9) + 4 + (4\alpha^2 - 12\alpha + 9)} = \sqrt{20\alpha^2 - 36\alpha + 22}
$
Equating Distance
$
\frac{|13 - 8\alpha|}{\sqrt{20\alpha^2 - 36\alpha + 22}} = \frac{5}{\sqrt{6}}
$
Squaring both sides:
$
\frac{(13 - 8\alpha)^2}{20\alpha^2 - 36\alpha + 22} = \frac{25}{6}
$
Cross-multiply:
$
6(169 - 208\alpha + 64\alpha^2) = 25(20\alpha^2 - 36\alpha + 22)
$
$
1014 - 1248\alpha + 384\alpha^2 = 500\alpha^2 - 900\alpha + 550
$
Bring all terms to one side:
$
-116\alpha^2 - 348\alpha + 464 = 0
$
Divide by $-4$:
$
29\alpha^2 + 87\alpha - 116 = 0
$
Solve the Quadratic equation:
$
\alpha = \frac{-87 \pm \sqrt{87^2 - 4 \cdot 29 \cdot (-116)}}{2 \cdot 29}
= \frac{-87 \pm \sqrt{21025}}{58}
= \frac{-87 \pm 145}{58}
$
$
\alpha_1 = \frac{58}{58} = 1, \quad \alpha_2 = \frac{-232}{58} = -4
$
$
\alpha_1 + \alpha_2 = -3$
Hence, the correct answer is -3.
Question 4:
Let A and B be two distinct points on the line $\mathrm{L}: \frac{\mathrm{x}-6}{3}=\frac{\mathrm{y}-7}{2}=\frac{\mathrm{z}-7}{-2}$. Both A and B are at a distance $2 \sqrt{17}$ from the foot of the perpendicular drawn from the point $(1,2,3)$ on the line L. If O is the origin, then $\overrightarrow{O A} \cdot \overrightarrow{O B}$ is equal to:
Solution:
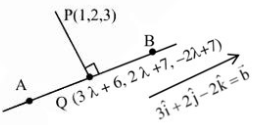
$\begin{aligned} & \overrightarrow{\mathrm{PQ}} \cdot \overrightarrow{\mathrm{b}}=0 \\ & \Rightarrow 3(3 \lambda+5)+2(2 \lambda+5)-2(-2 \lambda+4) \\ & \Rightarrow 17 \lambda=-17 \Rightarrow \lambda=-1\end{aligned}$
$\begin{aligned} & \mathrm{Q}(3,5,9) \\ & \text { Let } \mathrm{A}(3 \mu+6,2 \mu+7,-2 \mu+7) \\ & (3 \mu+3)^2+(2 \mu+2)^2+(-2 \mu-2)^2=68 \\ & \Rightarrow \mu^2+2 \mu-3=0 \mu=-3 \text { or } \mu=1 \\ & \mathrm{~A}(-3,1,13) \text { and } \mathrm{B}(9,9,5) \\ & \overrightarrow{\mathrm{OA}} \cdot \overrightarrow{\mathrm{OB}}=-27+9+65=47\end{aligned}$
Hence, the correct answer is 47.
Question 5:
If the image of the point $\mathrm{P}(1,0,3)$ in the line joining the points $\mathrm{A}(4,7,1)$ and $\mathrm{B}(3,5,3)$ is $Q(\alpha, \beta, \gamma)$, then $\alpha+\beta+\gamma$ is equal to:
Solution:
Given:
$P(1, 0, 3), \quad A(4, 7, 1), \quad B(3, 5, 3)$
Direction ratios of line $AB = B - A = (-1, -2, 2)$
Parametric form of line $AB:
\quad x = \lambda + 3, \quad y = 2\lambda + 5, \quad z = -2\lambda + 3$
Let foot of perpendicular from P to line AB be $R(\lambda + 3, 2\lambda + 5, -2\lambda + 3)$
Vector $\overrightarrow{PR} = \langle \lambda + 2, 2\lambda + 5, -2\lambda \rangle$
Direction vector of line $AB = \langle 1, 2, -2 \rangle$
Dot product must be zero: $\overrightarrow{PR} \cdot \vec{d}_{AB} = 0$
$\Rightarrow (\lambda + 2)(1) + (2\lambda + 5)(2) + (-2\lambda)(-2) = 0$
$\Rightarrow \lambda + 2 + 4\lambda + 10 + 4\lambda = 0$
$\Rightarrow 9\lambda + 12 = 0 \Rightarrow \lambda = -\frac{4}{3}$
Coordinates of foot $R:
\quad x = \frac{5}{3}, \quad y = \frac{7}{3}, \quad z = \frac{17}{3}$
Image of P about point R is:
$Q = 2R - P = \left( \frac{10}{3} - 1, \frac{14}{3} - 0, \frac{34}{3} - 3 \right) = \left( \frac{7}{3}, \frac{14}{3}, \frac{25}{3} \right)$
$\Rightarrow \alpha + \beta + \gamma = \frac{7 + 14 + 25}{3} = \frac{46}{3}$
Hence, the correct answer is $\frac{46}{3}$.
List of Topics According to NCERT/JEE Mains
This section highlights all the important topics of Three Dimensional Geometry as per the Class 12 NCERT and JEE Main syllabus, ensuring complete coverage for board and entrance exams.
Three Dimensional Geometry in Different Exams
The chapter Three Dimensional Geometry extends coordinate geometry from two dimensions to three dimensions and helps students understand the spatial relationship between points, lines, and planes. It is an important part of Class 12 Mathematics and is frequently tested in board and competitive examinations. Questions from this chapter assess a student’s ability to visualise objects in space, apply vector and coordinate methods, and use formulas accurately. Regular practice of NCERT problems and diagram-based questions is essential to master this chapter and score well in exams.
| Exam Name | Focus Area | Common Topics Asked | Preparation Tips |
|---|---|---|---|
| CBSE Board | Conceptual clarity & formula use | Direction cosines, direction ratios, equations of lines and planes | Learn formulas thoroughly and practise NCERT examples |
| JEE Main | Accuracy & coordinate geometry | Shortest distance, angle between lines and planes | Practise MCQs and numerical-based problems regularly |
| JEE Advanced | Analytical and vector approach | Skew lines, combined line–plane problems | Solve advanced-level problems and previous years’ questions |
| NEET | Basics & formula application | Distance formulas, angle between planes | Focus on direct application of standard formulas |
| State Board Exams (ICSE, UP Board, RBSE, etc) | Theory-oriented | Definitions, derivations, standard line and plane problems | Revise textbook theory and practice solved examples |
| Mathematics Olympiads | Conceptual depth | Complex spatial and reasoning-based problems | Strengthen fundamentals and practise higher-level questions |
Important Books and Resources for Class 12 Three Dimensional Geometry
Here you’ll find the most recommended books and study materials that explain concepts clearly and provide ample practice for mastering 3D Geometry.
| Book Title | Author / Publisher | Description |
|---|---|---|
| NCERT Mathematics Class 12 | NCERT | Official textbook covering all concepts of 3D Geometry thoroughly. |
| Mathematics for Class 12 | R.D. Sharma | Detailed theory and solved problems on Three Dimensional Geometry. |
| Objective Mathematics | R.S. Aggarwal | Topic-wise MCQs and practice questions aimed at board and competitive exams. |
| Arihant All-In-One Mathematics | Arihant | Comprehensive theory and practice problems covering 3D geometry. |
| Plane Trigonometry and Solid Geometry | S.L. Loney | Well-known classic book with exhaustive problems on 3D geometry. |
NCERT Resources For Three Dimensional Geometry
NCERT textbooks are the primary resource for building a strong foundation in Three Dimensional Geometry, with notes, step-by-step explanations and solved exercises and exemplar questions.
NCERT Subjectwise Resources
This part focuses on subject-specific NCERT resources like exemplar problems, solutions, and notes, so as to help students build their understanding of the concept.
| Subject | NCERT Notes Link | NCERT Solutions Link | NCERT Exemplar Link |
|---|---|---|---|
| Mathematics | NCERT Notes Class 12 Maths | NCERT Solutions for Class 12 Mathematics | NCERT Exemplar Class 12 Maths |
| Physics | NCERT Notes Class 12 Physics | NCERT Solutions for Class 12 Physics | NCERT Exemplar Class 12 Physics |
| Chemistry | NCERT Notes Class 12 Chemistry | NCERT Solutions for Class 12 Chemistry | NCERT Exemplar Class 12 Chemistry |
Practice Questions based on Three Dimensional Geometry
This section provides a collection of practice questions to test your understanding, improve accuracy, and prepare effectively for board exams and JEE Main.
Conclusion
The chapter Three Dimensional Geometry helps students understand and analyse the spatial relationships between points, lines, and planes using coordinate geometry. By mastering the concepts, formulas, and graphical interpretation, students develop strong spatial visualisation and problem-solving skills. This chapter is highly important for Class 12 board examinations and forms a foundation for advanced studies in engineering, architecture, physics, and computer graphics. With regular practice of NCERT problems and a clear understanding of formulas and diagrams, students can confidently tackle questions from Three Dimensional Geometry in both board and competitive exams.
Frequently Asked Questions (FAQs)
Three Dimensional Geometry is the branch of mathematics that deals with the position of points, lines, and planes in 3D space using three coordinates. It extends coordinate geometry from a flat plane (2D) into real-world space.
In JEE Main, 3D Geometry is a scoring topic because the questions are usually formula-based and less time-consuming compared to calculus. Mastering formulas for distance, angles, and equations of lines/planes can fetch quick marks.
The angle between two planes is the same as the angle between their normal vectors. If the planes are $a_1x+b_1y+c_1z+d_1=0$ and $a_2x+b_2y+c_2z+d_2=0$, then $\cos \theta = \frac{a_1a_2+b_1b_2+c_1c_2}{\sqrt{a_1^2+b_1^2+c_1^2}\sqrt{a_2^2+b_2^2+c_2^2}}$
The direction cosine formula is $
l=\frac{ \pm a}{\sqrt{a^2+b^2+c^2}}, m=\frac{ \pm b}{\sqrt{a^2+b^2+c^2}}, n=\frac{ \pm c}{\sqrt{a^2+b^2+c^2}}
$
Any three points that do not all lie on the same line, there is a unique plane that passes through these points. Just as a line is determined by two points, a plane is determined by three.