

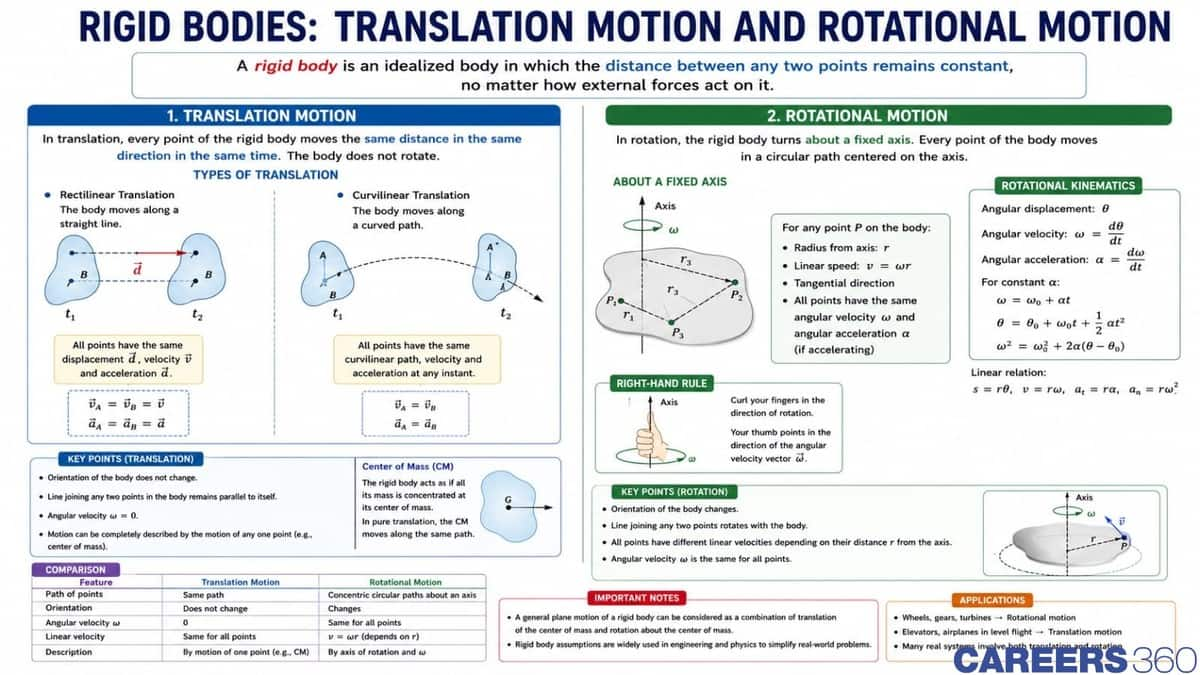
Rigid Bodies: Translational Motion And Rotational Motion
Rigid bodies, which don't change shape or size as they move, can exhibit two main types of motion: translational and rotational. Translational motion occurs when an object moves in a straight line, like a car driving down the road. Rotational motion happens when an object spins around a central point, like a spinning top. In everyday life, we encounter both types of motion frequently. For example, a soccer ball moves in a straight line when kicked and spins as it travels. Understanding these motions helps us better grasp how objects behave and interact, enhancing our ability to solve practical problems.
What is Pure Translational Motion?
If each particle of it has the same velocity/acceleration at a particular instant of time then A body is said to have pure translational motion.

What is Slipping?
It is a motion in which the body slides on a surface without rotation.
Example- Motion of a wheel on a frictionless surface.

Here friction between the body and surface = f = 0
Wheel possesses only translatory kinetic energy
i.e. - $K_T=\frac{1}{2} m v^2$
What is Pure Rotational Motion?
When a body rotates such that its axis of rotation does not move then that body is said to have pure rotational motion. In pure rotational motion, each particle of the body has the same angular velocity/acceleration about its axis of rotation at a particular instant of time.
Example- Spinning of the wheel about a fixed axis

Here, the axis of rotation of a wheel is fixed.
Here, body possesses only rotatory kinetic energy.
I.e $K_R=\frac{1}{2} I \omega^2$
Here Rotational angular momentum $=\vec{L}=I \vec{w}$
Where $I=$ Moment of inertia about a fixed axis of rotation and $\omega=$ angular velocity of rotation
Another example is the motion of the blades of a fan.
Recommended Topic Video
Combined Rotation and Translation Motion
In this type of motion, the body has both rotation and translation motion.
Rolling
In the case of rolling motion, a body rotates about a fixed axis, and the axis of rotation also moves.
Example- Rolling of football on the ground
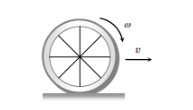
Here friction between the body and surface $=f \neq 0$
Kinetic Energy
The total kinetic energy of the body is the sum of both translational and rotational kinetic energy.
$
K_{n c t}=K_T+K_R=\frac{1}{2} m V^2+\frac{1}{2} I \omega^2
$
Using $V=\omega R$ and $I=m K^2$
$
K_{\text {net }}=K_T+K_R=\frac{1}{2} m V^2\left(1+\frac{K^2}{R^2}\right)
$
Net Velocity at a point
$
\vec{V}_{\text {net }}=\vec{V}_{\text {translation }}+\vec{V}_{\text {rotation }}
$
Where, $\vec{V}_{r o t}=r w$
How to Calculate Angular Momentum?

Angular momentum is always calculated at a particular point. The net Angular momentum of a body is the sum of angular momentum due to both translational and rotational motion.
$\begin{aligned} \vec{L} & =L_{\text {com }}^{\overrightarrow{ }}+m\left(\vec{r} \times v_{\text {com }}^{\overrightarrow{ }}\right) \\ \Rightarrow \vec{L} & =I_{\text {com }} \vec{\omega}+m\left(\vec{r} \times v_{\text {com }}^{\vec{\omega}}\right)\end{aligned}$
Where $L_{\text {com }}$ represents the angular momentum of the body about the centre of mass and r is the position vector about which we have to calculate the angular momentum.
Recommended Topic Video
Solved Example Based on Conservation of Angular Momentum
Example 1: A solid disc of mass m is rolling with translation velocity V m/s.Find the minimum value of V (in m/sec) to reach height h = 7.5 m

1) 5
2) 7
3) 8
4) 10
Solution:
The kinetic energy of a body in combined rotation and translation -
$\begin{aligned} & K . E=\frac{1}{2} I_{c m} w^2+\frac{1}{2} m v_0^2 \\ & \text { wherein } \\ & \frac{1}{2} m v_0^2=\text { Translational kinetic energy of the centre of mass } \\ & \frac{1}{2} I_{c m} w^2=\text { Rotational kinetic energy about the centre of mass } \\ & \text { Form energy conservation } \\ & \mathrm{W}_{\mathrm{R}}=\Delta K E \\ & m g g h=\frac{1}{2} m v^2+\frac{1}{2} I W^2 \\ & \left.m g h=\frac{1}{2} m v^2+\frac{1}{2}\left[\frac{1}{2} m R^2\right]\right)\left(\frac{V^2}{R^2}\right) \\ & m g h=\frac{1}{2} m v^2+\frac{1}{4} m v^2 \\ & m g h=\frac{3}{4} m v^2 \Rightarrow v=\sqrt{\frac{4}{3} g h} \\ & v=\sqrt{\frac{4}{3}} \times 10 \times 7.5 \Rightarrow v=10 m / s\end{aligned}$
Hence, the answer is option (4).
Example 2:Two coaxial discs, having moments of inertia $I_1$ and $\frac{I_1}{2}$, are rotating $\frac{\omega_1}{2}$, about their common axis. They are with respective angular velocities $\omega_1$ and $\overline{2}$, about their common axis. They are brought in contact with each other and thereafter they rotate with a common angular velocity. If $E_f$ and $E_i$ are the final and initial total energies, then $\left(E_f-E_i\right)$ is :
1) $-\frac{I_1 w_1^2}{12}$
2) $\frac{I_1 w_1^2}{6}$
3) $\frac{3 I_1 w_1^2}{8}$
4) $-\frac{I_1 w_1^2}{24}$
Solution:
The kinetic energy of a body in combined rotation and translation -
$
\begin{aligned}
& K . E=\frac{1}{2} I_{c m} w^2+\frac{1}{2} m v_0^2 \\
& \text { wherein } \\
& \frac{1}{2} m v_0^2=\text { Translational kinetic energy of the centre of mass } \\
& \frac{1}{2} I_{c m} w^2=\text { Rotational kinetic energy about the centre of mass } \\
& F_{\text {ext }}=0
\end{aligned}
$
So,
$
\begin{aligned}
& L_i=L_f \\
& L_i=I_1 \omega_1+\frac{I_1}{2} \frac{\omega_1}{2} \\
& L_f=\left(I_1+\frac{I_1}{2}\right) \omega_f \\
& L_i=L_f \\
& \frac{5 I_1 \omega_1}{4}=\frac{3 I_1 \omega_f}{2}
\end{aligned}
$
$\begin{aligned}
& \omega_f=\left(\frac{5}{6}\right) \omega_1 \\
& K . E_I=\frac{1}{2} I_1 \omega_1^2+\frac{1}{2} \times \frac{I_1}{2} \times \frac{\omega_1^2}{4} \\
& K \cdot E_f=\frac{1}{2}\left(I_1+\frac{I_1}{2}\right) \omega_f^2 \\
& \Delta K \cdot E=K \cdot E_f-K \cdot E_I \\
& =\frac{1}{2}\left(I_1+\frac{I_1}{2}\right) \omega_f^2-\left(\frac{1}{2} I_1 \omega_1^2+\frac{1}{2} \times \frac{I_1}{2} \times \frac{\omega_1^2}{4}\right) \\
& =\frac{1}{2} I_1 \omega_1^2\left(\frac{25}{24}-\frac{9}{8}\right) \\
& =-\frac{I_1 w_1^2}{24} \\
&
\end{aligned}$
Hence, the answer is the option (4).
Example 3: A solid sphere and cylinder of identical radii and mass approach an incline with the same liner velocity (see figure ). Both roll without slipping all throughout. The two climb maximum heights $h_{s p h}$ and $h_{\text {cyl }}$ on the incline. The ratio $\frac{h_{s p h}}{h_{c y l}}$ is given by:

1) $\frac{2}{\sqrt{5}}$
2) 1
3) $\frac{14}{15}$
4) $\frac{4}{5}$
Solution:
$
V=w R
$
For sphere
$
\begin{aligned}
m g h_1 & =k_1=\frac{1}{2} I w^2+\frac{1}{2} m v^2 \\
& =\frac{1}{2} \times \frac{2}{5} m R^2 w^2+\frac{1}{2} m v^2 \\
& =\left(\frac{1}{5}+\frac{1}{2}\right) m v^2=\frac{7}{10} m v^2
\end{aligned}
$
For solid cylinder
$
\begin{aligned}
& m g h_2=k_2=\frac{1}{2} m v^2+\frac{1}{2} \frac{m R^2}{2} w^2=m v^2\left(\frac{1}{2}+\frac{1}{4}\right)=\frac{3}{4} m v^2 \\
& \frac{m g h_1}{m g h_2}=\frac{k_1}{k_2}=\frac{\frac{7}{10} m v^2}{\frac{3}{4} m v^2}=\frac{28}{30}=\frac{14}{15}
\end{aligned}
$
Hence, the answer is option (3).
Example 4: The following bodies are made to roll up (without slipping) the same inclined plane from a horizontal plane :(i) a ring of radius R , (II) a solid cylinder of radius $\frac{R}{2}$ and (iii) a solid sphere of radius $\frac{R}{4}$. If in each case, the speed of the centre of mass at the bottom of the incline is the same, the ratio of the maximum heights they climb is :
1) $4: 3: 2$
2) $20: 15: 14$
3) $14: 15: 21$
4) $2: 3: 4$
Solution:
$
\begin{aligned}
& \frac{1}{2} m v_0^2=\text { Translational kinetic energy of the centre of mass } \\
& \frac{1}{2} I_{c m} w^2=\text { Rotational kinetic energy about the centre of mass }
\end{aligned}
$
$h=\frac{\left(1+\frac{K^2}{R^2}\right) V^2}{2 g}$ using the values of $\frac{K^2}{R^2}$ for given bodies, where K is the radius of gyration
$
=h_1: h_2: h_3=20: 15: 14
$
Hence, the answer is the option (2).
Example 5: A uniform sphere of mass 500 g rolls without slipping on a plane horizontal surface with its centre moving at a speed of 5.00 cm/s. Its kinetic energy is :
1) $6.25 \times 10^{-4} \mathrm{~J}$
2) $1.13 \times 10^{-3} \mathrm{~J}$
3) $8.75 \times 10^{-4} \mathrm{~J}$
4) $8.75 \times 10^{-3} \mathrm{~J}$
Solution:
The kinetic energy of the sphere is the kinetic energy of translation+ kinetic energy of rotation
$
K=\frac{1}{2} m v^2\left(1+\frac{k^2}{R^2}\right)
$
Where K is the radius of gyration
$
\begin{aligned}
& K=\frac{1}{2} \times 0.5\left(\frac{5}{100}\right)^2\left(1+\frac{2}{5}\right) \\
& K=\frac{35}{4} \times 10^{-4} J=8.75 \times 10^{-4} J
\end{aligned}
$
Hence, the answer is the option 3.
Summary
An object's angular momentum is represented by the equation or formula L = r⊥mv, which only changes when a net torque is applied. Thus, in the absence of torque, the object's perpendicular velocity will vary based on the radius, which is the separation between the body's mass centre and the circle's centre. It indicates that for shorter radii, velocity will be high and for longer radii, low.
